







-
26.02.2026
Perpa Muhasebe Meslek Grubu’ndan Yöneticiliğimize Hayırlı Olsun Ziyareti
detaylı bigi

-
24.02.2026
PERPA TİCARET MERKEZİ'NDEN ARNAVUTKÖY BELEDİYE BAŞKANI MUSTAFA CANDAROĞLU'NA ZİYARET
detaylı bigi

-
20.02.2026
Bezmialem Vakıf Üniversitesi ile Perpa Ticaret Merkezi arasında %20 indirim anlaşması sağlanmıştır.
detaylı bigi

-
19.02.2026
Yöneticiliğimize Hayırlı Olsun Ziyareti
detaylı bigi

-
18.02.2026
PERPA B Blok Yönetimi Güven Tazeledi
detaylı bigi

-
08.11.2025
Perpa Ana Kapılar İhalesi
detaylı bigi
-
06.01.2025
A Blok Kat Malikleri Yöneticiliği 2025 Olağan Kat Malikleri Genel Kurul toplantı
detaylı bigi
-
19.04.2021
Genel Kurulumuz Pandemi Nedeniyle Ertelendi
detaylı bigi

-
05.03.2018
İto İstanbul Ticaret odası seçimleri 9 Nisan'da
detaylı bigi

-
14.12.2017
İstanbul Haberleri Mart 2017
detaylı bigi

-
14.12.2017
İstanbul Haberleri Şubat 2017
detaylı bigi

-
21.11.2017
İran Ticari Ataşesi Perpa'ya Geliyor.
detaylı bigi

-
02.11.2017
Elektrik Sistemlerinde Enerji Kalitesi
detaylı bigi

-
25.08.2016
30 Ağustos Zafer Bayramı Kutlu Olsun
detaylı bigi
-
08.05.2015
Murat Başesgioğlu ve Celal Adan'ın da bulunduğu MHP Milletvekili adayları Perpa'yı ziyaret etti.
detaylı bigi

-
27.03.2015
19 - 22 Mart'ta Tüyap'ta yapılan WIN Fuarına katıldık.
detaylı bigi

NET MÜHENDİSLİK OTOMASYON SAN. VE TİC. A.Ş.

1994 yılında müşteri ihtiyaçlarına kaliteli, güvenilir ve ekonomik çözümler üretmek amacıyla kurulan NET MÜHENDİSLİK otomasyon alanında Türkiye’nin köklü firmalarından bir tanesidir. Otomasyon ürünleri ve otomasyon sistemleri konusuna yoğunlaşan firmamızın, alanlarında dünya çapında söz sahibi olan çeşitli markaların temsilcilikleri ve bayilikleri bulunmaktadır.
Hedefimiz
Otomasyon konusundaki ihtiyaçlarınıza; kaliteli, güvenilir ve ekonomik çözümler üretmek..
Ürün Gruplarımız
Firmamız, Otomasyon ürünleri ve otomasyon sistemleri satışı konusunda faaliyet göstermektedir.
Otomasyon ürünleri : Endüktif Sensörler, Kapasitif ve Magnetik Sensörler, Fotoelektrik Sensörler, Ultrasonik Sensörler, Güvenlik Bariyerleri, Enkoderler, Otomatik Kapı ve asansör sensörleri.
Otomasyon Sistemleri : Otomatik Tanıma sistemleri, PLC ve HMI(operatör paneller) sistemleri.
Satış Kadromuz
Müşteri memnuniyetini her zaman ön planda tutan ve bu amaçla hizmeti müşterinin ayağına götürmeyi ilke edinmiş olan Net Mühendislik, uygulama tecrübesi yüksek teknik satış kadrosu ile sizin yanınızda.
OTOMASYON UYGULAMALARI
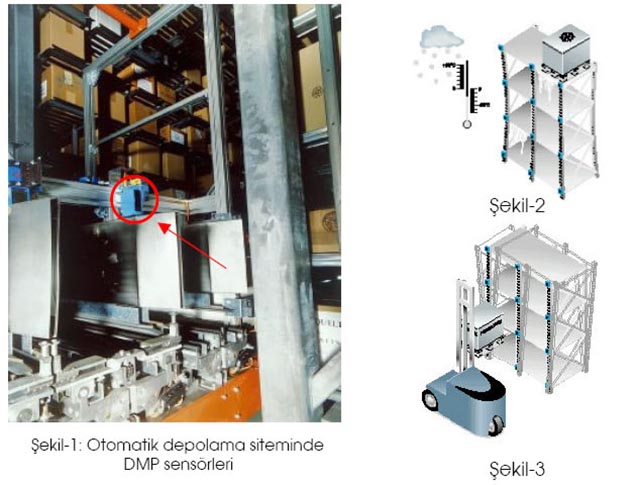
OTOMATİK DEPOLAMA SİSTEMLERİ
PROBLEM
“ Otomatik yükleme ve boşaltma bantlarının olduğu yüksek raf sistemine sahip depolarda , sıcaklık(Şekil2), yük ağırlıklarının farklılığı ve raf sistemindeki demir aksamın yapısından dolayı, bantlar verimli bir şekilde çalışmamakta ve yükleme boşaltma sırasında kazalar meydana gelmektedir. ”
ÇÖZÜM
“ Otomatik yükleme bandına yerleştirilen DMP model bir sensör ile bandın tam olarak istenilen pozisyona gelip gelmediği kontrol edilebilir. Sensör bu işlemi şu şekilde yapmaktadır: Bandın tam olarak yerleşmesi gereken konumunu belirlemek için bir reflektör yerleştirilir. Sensör bu reflektöre bir ışık yollar ve reflektörden yansıyan ışık fotosele geri döner. Yansıyan ışık fotoselin içerisinde değerlendirilir ve XY koordinatlarında olmak üzere 2 boyutlu olarak analog bir bilgi verir. Bu bilgi yardımıyla reflektörün, fotosel ışık kaynağının tam ortasına pozisyonlanması sağlanır. Böylelikle raf sisteminde meydana gelen herhangi bir bozulma, kayma( Şekil3) veya sarkma düzeltilmiş olur. Pozisyonlama tam olarak yapıldıktan sonra ise sistem artık hatasız ve problemsiz olarak yükleme boşaltma yapmaya hazırdır. Böyle bir sistem kullanıcıya kazasız bir yükleme boşaltmayla birlikte güvenliği, yine kazasız çalışmayla birlikte bekleme maliyetlerinde azalmayı ve hızı kazandıracaktır. ”
BARKOD SİSTEMLERİ
PROBLEM
“ Bir taşıma şirketinde çok farklı büyüklükte ve ebatta paketler taşınmaktadır. Bu paketlerin takibi amacıyla üzerlerine barkod etiketleri yapıştırılmaktadır.Ancak bu etiketlerin kutu üzerindeki yeri, yönü ve kutuların boyutlarının belli olmaması barkod etiketlerinin okunmasında probleme sebep olmaktadır. ”
ÇÖZÜM
“ Farklı ebattaki paketler CLV490 serisi barkod okuyucularla oluşturulan okuma penceresinden geçirilmelidir. Bu okuma penceresi biribirine ortalama 90 derece açıyla yerleştirilen 4 adet CLV 490 barkod okuyucudan oluşmaktadır. Bu sayede paket üzerinde herhangi bir noktada bulunan barkod etiketi okunabilmektedir. Bununla birlikte sisteme adapte edilecek 5. bir barkod okuyucu ile paketlerin yan tarafındaki barkod etiketleri bile algılanabilmektedir. Barkod okuyucular , yüksek anahtarlama frekansları sayesinde(1200 Hz) çok yüksek band hızlarında bile algılama yapılabilmektedir.Farklı boyutlardaki paketlerin üzerinde bulunan barkod etiketleri, barkod okuyucuların “Gerçek Zamanlı Otomatik Fokus” özelliği sayesinde okunur. Gerçek Zamanlı Otomatik Fokus, barkod okuyucunun, okuma mesafesi içerisindeki etikete, otomatik olarak odaklanıp, etiketi okumasıdır. Bu sayede barkod etiketinin okuyucuya olan mesafesi önemini yitirmektedi Ayrıca sadece Sick firmasının ürünlerinde bulunan SMART özelliği sayesinde, üzeri kapanmış, yıpranmış veya silinmiş barkod etiketleri dahi okunabilmektedir. ”
ETİKETLEME MAKİNALARI
PROBLEM
“ Ketçap şişeleri etiketlenirken ön ve arka yüzeylerine farklı farklı etiketler yapıştırılmaktadır. Ancak etiketlenecek şişenin hangi yüzünün mekanizmaya geldiğinin anlaşılamamasıya yapıştırılan etiketlerde problem yaratmaktadır. ”
ÇÖZÜM
“ Otomatik olarak çift taraflı etiket yapıştırılan etiketleme makinalarında ortaya çıkan bu problem ICS model kamera sensörü kullanılarak ortadan kaldırılmaktadır. Sistem şu şekilde çalışmaktadır: Sisteme monte edilen ICS kamera sensörü, şişelerin ön taraflarının mı, arka taraflarının mı? geldiğini anlamaktadır. Bu işlem ise ketçap şisesinin ön tarafında bulunan açma kapağının üzerindeki çukurluk algılanarak yapılmaktadır. ICS kamera sensörü şişe üzerine homojen bir ışık yollar. Bu ışığın, açma kapağının üzerindeki çukurlukta oluşturduğu gölge yardımıyla sensör şişenin doğru tarafının mekanizmaya yerleştirildiğini anlar. Ve böylelikle doğru tarafa etiketi yapıştırarak etiketlenmiş şişeyi sisteme verir. Şayet gölge oluşmamışsa, kamera sensörü sisteme bir tetikleme sinyali yollar ve şişenin 180 derece döndürülmesi sağlanır. ICS kamera sensörü kompakt yapıda bir sensör olduğu için makinalara kolay şekilde adapte edilebilmektedir. VSC programlama cihazı sayesinde rahat bir programlama yapılabilmekte ve farklı uygulamalarda dahi en üst düzey çözüm imkanı sunabilmektedir. ”
DEMİR & ÇELİK SEKTÖR ÇÖZÜMLERİ
PROBLEM
“ Demir çelik sektöründe çalışan bir firmada, üretim aşamasında ısıtma fırınlarına giren ve çıkan çelik blokların herhangi bir çarpışma ve kaza olmadan bant boyunca taşınması isteniyor. Ancak ortam şartlarının zorluğu (yüksek sıcaklık, toz vb.) ve yüksek hassasiyet ile pozisyon kontrolü isteği uygulamayı zorlaştırmaktadır. ”
ÇÖZÜM
“ Çelik blokların pozisyonları, lazer alan tarayıcı fotosel olan LMS220 ile tam olarak algılanmaktadır. Fırınların girişlerine ve çıkışlarına yerleştirilen LMS tarayıcılar, 10 metre mesafeden çok yüksek hassasiyetle bu ölçümü gerçekleştirmektedir. Bu tarayıcılar, 180 derece’lik bir taramayı 0,25 derece hassasiyatle yapabilmekte, bu da 712 farklı ölçüm değerine karşılık gelmektedir. Fırın girişlerinde ve çıkışlarında bulunan kontrolörler, LMS’lerden alınan değerleri Profibus DP aracılığıyla okuyarak, çelik blokların kontrolünü tam olarak gerçekleştirmektedir. Böylelikle bloklar birbirlerine veya herhangi bir yere çarpıp hasar görmeden taşınabilmektedir. Bu da firmaya üretim planına uymada ve üretim maliyetlerini azaltmada büyük avantaj sağlamaktadır. ”
AĞAÇ İŞLEME SEKTÖRÜ
PROBLEM
“ Bir hat boyunca ilerleyen farklı ölçülerdeki ağaç blokların 7 metrenin üzerindeki bir mesafeden algılanması ve tam olarak testerenin önündeki yerlerine gelmelerinin ve istenen boyda kesilmelerinin sağlanması. ”
ÇÖZÜM
“ Böyle bir uygulama için DMT10 model bir mesafe ölçüm sensörü kullanılmıştır. Aslında bu mesafe ölçüm fotoseli, cisimden yansımalı prensibe sahip mesafe fotoselleri için çok yüksek bir mesafe olan 155 metreye kadar algılama yapabilmektedir. Açık renkli cisimlerde ulaşabildiği bu mesafe, %6’lık ışık yansıtma karakterine sahip olan siyah bir cisimde bile 40 metreyi bulmaktadır. Infrared bir ışık kaynağından pals’ler halinde çıkan ışık, ağaç bloktan yansır ve mesafe ölçüm fotoseline geri döner. Fotosel, ışığın bu gidiş ve geri gelişinden mm hassasiyetinde ve aynı tekrarlanabilirlikte mesafe bilgisini hesaplar. Hesaplanan bu bilgi RS422 aracılığıyla değerlendirici üniteye iletilir. Cihazın fonksiyonu olarak bu bilgi istenirse Analog çıkış olarak da alınabilir. Bilindiği gibi cisimden yansımalı fotosellerde ışığın yansıyacağı yüzeyin şekli çok önemlidir. Bu uygulamada da ağacın yüzeyi üzerinde bulunan budak vb. deformasyonlar algılamayı etkileyeceğinden , algılama mesafesi yüksek ve ışık kaynağı kuvvetli bir sensör kullanılmıştır. Böylelikle istenilen uzaklıklarda doğru ve eksiksiz mesafe bilgisi alınmaktadır. ”
MEKANİK GÜVENLİK SWITCHLERİ
PROBLEM
“ Otomotiv fabrikasındaki üretim hattında çalışan robot kollar, operatör müdahalesi olmadan çalışmaktadırlar. Robot kolların etrafında güvenlik için teller mevcuttur. Ancak robot kol çalışırken bir kişinin içeriye girmesi çalışan kişi için tehlike oluşturmaktadır. ”
ÇÖZÜM
“ Robot hücrenin giriş kapısına yerleştirilen i1001 Lock model güvenlik switch’I ile tehlike ortadan kaldırılmaktadır. Güvenlik switch’I kapının kenarına, mekanik parça ise kapının üzerine monte edilir. Kapı kapatıldıktan sonra mekanik parça güvenlik switch’inin içine doğru itilir. Robot kol ancak bu işlemden sonra çalışabilir . Sistemde selenoid kilitlemeli güvenlik switch’i kullanıldığı için, robot kolun çalışması sırasında içeriye giriş imkansızdır.Şayet riskli alana bir giriş yapılmak isteniyor ise önce robot kol tamamen durdurulmalıdır. Bu işlemden sonra risk ortadan kalkmış olur. Robot kolun durma olayı mekanik switch’e bir sinyal olarak iletilir. Bu sinyalin ardından güvenlik switch’i üzerinde bulunan selenoid vasıtasıyla yapmış olduğu kilitlemeyi kaldırır ve kapı açılabilir konuma gelir.Kullanılan ürün ağır kapılar ve farklı kapı yönlerinde de kararlı çalışmayı garanti eder. Güvenlik switch’i üzerinde bulunan iki adet led, giriş kontrolleri ve kapının açık olup olmadığı hakkında bilgi verir. Ürün sağlam ve ekonomik yapısı ile kullanıcıya, uzun kullanım ömrü ve maliyet tasarrufu sağlamaktadır. ”
VİNÇ POZİSYON BİLGİLİSİ
PROBLEM
“ Bir liman işletmesinde 20 adet vinç’in pozisyonlarının otomatik olarak belirlenip tek bir noktadan kontrol edilmesi isteniyor. Ancak ölçümlerin açık havadayapılıyor olması, sistemin hava şartlarından direkt etkilenmesine yol açmaktadır. Ayrıca sistemin ve ölçüm alanının büyüklüğü deölçümü olumsuzyönde etkilemektedir. ”
ÇÖZÜM
“ Sistem optik bir fotosel kullanılarak gerçekleştirilebilir. Ancak bu çözüm ortam şartları nedeniyle (sıcaklık,yağmur vb) sağlıklı olmaz. Bu sebeple sistem manyetik esasla çalışan absolute algılama prensibine sahip bir mesafe ölçüm sensörü olan POMUX KH53 ile gerçekleştirilmiştir. Algılama sisteminden dolayı KH53 , yağmur ve kar yağışı gibi ortamın olumsuz koşullarından etkilenmez. Çalıştığı ortam sıcaklığı -20...+85 derece arasındadır. Sistem, sabit olan ve 1700 metreye kadar kurulabilen alüminyum profil ve okumayı gerçekleştiren haraketli sensör kafasından oluşmaktadır. Alüminyum profilin üzerine belli aralıklarla yerleştirilen mıknatıs parçalar, sensör kafası tarafından algılanırken belli bir kodoluştururlar. Bu kod daha sonra mesafe bilgisi olarak sisteme aktarılır. Sistemin absolute esasa göre çalışıyor olması, enerji kesilmelerinde dahi vinçlerin pozisyon bilgilerinin güvenliğini sağlar. Sistemin maksimum çalışma mesafesi 1700 mm’dir. Sistem bu mesafede 0,1mm çözünürlükte ölçüm yapmaktadır. ”
MATBAA SEKTÖRÜ
PROBLEM
“ Paketleme makinalarında ilerleyen ilaç kutuları; gazete ve dergi matbaalarında basılan dergiler bir hat boyunca ilerlerken sayılmak istenmektedir. Günümüzde bu işlem, mekanik şekilde deyapılabilmesine karşın, sayım doğruluğu ve güvenilirliğinin sağlanması büyük bir sorun oluşturmaktadır. Basılan adetler gözönüne alınırsa, müşterilere vaad edilen sayıların önemi de bir kat daha artmaktadır. ”
ÇÖZÜM
“ Sick, bu tür uygulamalar için DMH isminde bir fotosel geliştirmiştir kullanılması gerekmektedir. Bu fotosel, gazete ve dergi gibi bantta üstüste ilerleyen ürünlerin kenarlarını saymak için tasarlanmıştır. Fotoselin yolladığı lazer ışın, ürünler üzerinde 25 mm’lik bir lazer çizgi oluşturmaktadır. Fotosel çizgisinin üzerinde meydana gelen yükselmeler ve tekrar alçalmalar fotosel tarafından algılanmakta ve bir çıkış sinyaline dönüştürülmektedir. Sensör minimum 1,6 mm kalınlığındaki farkları okuyabilmektedir. Diğer sistemlere göre DMH’ın avantajı üretim bantlarında meydana gelen titreme ve sarsıntılarda dahi hatasız sayım yapılabilmesidir ki bu da sayım doğruluğu ve güvenilirliğini beraberinde getirmektedir. ”
OTOMOTİV YAN SANAYİ
PROBLEM
“ Araç yakıt pompası üretim hattında, motor rotorunun, motor gövdesine göre pozisyonu otomatik olarak 0,125 mm hassasiyetle ayarlanmalıdır. Bu şekilde robot tarafından yapılacak montajın tam olarak doğru ve sıkı şekilde yapılması sağlanabilmektedir. Uygulama gereklilikleri oldukça zorlayıcı ve sınırlandırmalar getirmektedir. ”
ÇÖZÜM
“ Uygulama tarafında oluşan gereklilikler tam olarak OD Hi ürünü tarafından karşılanmaktadır. Ürün, Sınıf-2 Lazer ışığı kullanmaktadır. Algılama mesafesini öğrenme özelliği (Teach-in) ve dijital çıkışı ile yüksek hassasiyetle sinyal değerlendirme işlemini gerçekleştirmektedir. Uygulama açısından önem taşıyan noktalardan biri olan yansıma problemini, OD Hi ürünü CMOS algılayıcısının kararlı ve güvenilir ölçümlemesi sayesinde aşmaktadır. Her montaj noktasında iki adet OD Hi, 90° açı ile armatüre doğru bakarlar. Öğretilmiş olan mesafeye uygun dijital çıkışlar, mesafe bilgisi ölçme toleransı olan 0,125 mm sınır içerisinde ise aktif olmaktadır. Böylece her iki OD Hi cihazı kontrol sistemine doğru pozisyon bilgisini verince robot kol motor yerleşimini gerçekleştirir. Geçmiş dönem içerisinde yaşanan hedefleme hatası nedeniyle meydana gelen gövde ve motor kayıpları yeni OD Hi sistemi kullanılarak düzeltilmiştir. ”
ÇELİK BORU SEKTÖRÜ
“ PROBLEM:Kaynak hatlarında iki boru parçasının birbirine kaynaklanması zahmetli bir prosestir. Kaynaklama işlem yapıldıktan sonra kaynak noktasının belirlenip, yapılacak işlemlerin bu noktaya göre referans alınması gerekmektedir. Ancak ortam şartlarının zorluğu yapılacak algılamayı güçleştirmektedir.... ”
TOZLU ORTAMDA SEVİYE ALGILAMA
“ PROBLEM:Bir un fabrikasında buğday silolarının seviyelerinin kontrol edilmesi gerekmektedir. Buğdaylar siloya kamyonlar vasıtasıyla boşaltılmakta ancak boşaltım sırasında tozuşma olmaktadır. Ortam ısısındaki mevsimsel değişiklikler de yapılacak olan algılamayı zorlaştırmaktadır.... ”
DONDURULMUŞ GIDA SEKTÖRÜ
“ PROBLEM:Yiyecek alışkanlıklarını hızla değiştiği günümüzde donmuş gıdaların tüketimi kişi başı oratalama 3540 kg/yıl bulmaktadır. Gıdaların saklanma koşullarını düşündüğümüzde 25, 30 derecelerden bahsetmekteyiz. Bu düşük sıcaklıklarda malzemeleri algılayacak sensörlerin çalışması oldukça zorlu bir otomasyon problemidir.... ”
HİJYENiK ORTAMLAR YA DA TOZA,SUYA KARSI
“ PROBLEM:Gıda üretimi yapılan bir fabrikada hijyen olmazsa olmaz bir kuraldır.Ortamda kullanılan cihazlar, sistemlerin temizlenmesinde kullanılacak olan suya ve kimyasallara dayanıklı olmalıdır. Bunun yanında ortamda bir de çalışanların güvenliğinin sağlanması gerekmektedir. Güvenlik cihazları ve yüksek koruma sınıfı aşılması gereken zor bir problemdir.... ”
PRES GÜVENLİĞİ
“ PROBLEM:1) Firmamızda çalışan punç presin insanlar açısından güvenli olmasını istiyoruz 2) Otomatik olarak çalışan karoseri preslerimizde, karoserlerin yüklenmesi ve boşaltılması esnasında hareketli masaların yakınına insan girişinin englellenerek güvenliğin sağlanmasını istiyoruz.... ”
MATBAA VE BASKI SEKTÖRÜ
“ PROBLEM:Bir baskı makinesinde baskı yapılacak olan kağıtlar rulolar arasından çok hızlı bir şeklide akmaktadır. Bazı zamanlarda baskının yapılacağı alanın genişliği 0,04 mm’ye kadar düşmektedir. Bu sebepten , baskının tam olarak doğru yere yapılabilmesi için ruloların birbirleriyle senkron çalışmaları gerekmektedir.... ”
YİYECEK İÇECEK SEKTÖRÜ
“ PROBLEM:İçecek üreten büyük bir firmada, üretilen içecekler metal kutulara doldurulmaktadır. Ancak sevkiyat esnasında kutuların üzerine yapıştırılan etiketlerin kontrol edilmesi gerekmektedir. Etiketlerin 7 farklı renk’te olması, her zaman aynı yere yapıştırılmamaları ve üretim prosesindeki yerleşim gereği algılama yapacak olan sensörün yakına koyu... ”
ETİKETLEME MAKİNALARI 2
“ PROBLEM:Ürettiğimiz ürün şişilerinin üzerine etiket yapıştırmak istiyoruz. Ancak daha önce kullanılan etketler şimdi kullandıklarımızdan 3 kat daha büyüktü. Şimdi kullanılan etiketler ile hızımız 3 katına çıktı. Sistemde kullanılan sensör bu hıza cevap veremiyor. Ayrıca eski sistem sensör üzerindeki pot yardımıyla ayarlanıyor. Zamanla bu pot kı... ”
ASKILI KONVEYÖR HATLARI
“ PROBLEM:Takim elbise ve gömlek üreten bir fabrikada ürünler konveyörde asılı olarak taşınmaktadır. Bu noktada askıların algılanması istenmektedir. Ancak uygulama, yapılacağı yer sebebiyle birçok zorluk ortaya çıkarmaktadır. Algılama yapılacak olan yerin çok dar olması, algılanacak olan askının bu noktaya uzak olması ve ortamda bulunan harici ışık kaynakları bu... ”
- Zaman Kontrol Sistemleri
- Elektronik Otomasyon
- Robot Teknolojileri Robot Malzemeleri
- Mühendislik
- Proje ve Danışmanlık


haberdar olmak için bilgilerinizi bizimle
paylaşın.
sosyal ağlardan takip
edebilirsiniz
bizimle paylaşabilirsiniz. Görüşleriniz
bizler için değerlidir.
